Physicist: This is a question that comes up a lot when you’re first studying linear algebra. The determinant has a lot of tremendously useful properties, but it’s a weird operation. You start with a matrix, take one number from every column and multiply them together, then do that in every possible combination, and half of the time you subtract, and there doesn’t seem to be any rhyme or reason why. This particular math post will be a little math heavy.
If you have a matrix, ")
 = \sum_{\vec{p}}\sigma(\vec{p}) a_{1p_1}a_{2p_2}\cdots a_{np_n}")
")
")

")
For example, if  = \left(\begin{array}{ccc}4 & 2 & 1 \\2 & 7 & 3 \\5 & 2 & 2 \\\end{array}\right)")
 \\= \sum_{\vec{p}}\sigma(\vec{p}) a_{1p_1}a_{2p_2}a_{3p_3} \\=\left\{\begin{array}{ll}\sigma(1,2,3)a_{11}a_{22}a_{33}+\sigma(1,3,2)a_{11}a_{23}a_{32}+\sigma(2,1,3)a_{12}a_{21}a_{33}\\+\sigma(2,3,1)a_{12}a_{23}a_{31}+\sigma(3,1,2)a_{13}a_{21}a_{32}+\sigma(3,2,1)a_{13}a_{22}a_{31}\end{array}\right.\\=a_{11}a_{22}a_{33}-a_{11}a_{23}a_{32}-a_{12}a_{21}a_{33}+a_{12}a_{23}a_{31}+a_{13}a_{21}a_{32}-a_{13}a_{22}a_{31}\\= 4 \cdot 7 \cdot 2 - 4 \cdot 2 \cdot 3 - 2 \cdot 2 \cdot 2 +2 \cdot 2 \cdot 1 + 5 \cdot 2 \cdot 3 - 5 \cdot 7 \cdot 1\\=23\end{array}")
Turns out (and this is the answer to the question) that the determinant of a matrix can be thought of as the volume of the parallelepiped created by the vectors that are columns of that matrix. In the last example, these vectors are ")
")
")
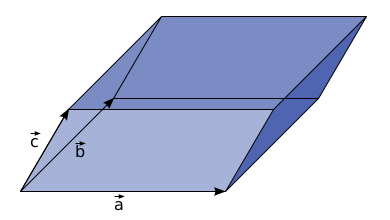
The parallelepiped created by the vectors a, b, and c.
Say the volume of the parallelepiped created by 
")
1) =0")
2) =aD\left(\vec{v}_1,\cdots,\vec{v}_n\right)")
3)  = D\left(\vec{v}_1,\cdots, \vec{v}_n\right) + D\left(\vec{w},\cdots, \vec{v}_n\right)")

Check this out! By using these properties we can see that switching two vectors in the determinant swaps the sign.

4) =-D\left(\vec{v}_2,\vec{v}_1, \vec{v}_3\cdots, \vec{v}_n\right)")
Finally, if ")
")
")
5)  = 1")
Also notice that, for example,
 = \left(\begin{array}{c}v_{21}\\0\\\vdots\\0\end{array}\right)+\left(\begin{array}{c}0\\v_{22}\\\vdots\\0\end{array}\right)+\cdots+\left(\begin{array}{c}0\\0\\\vdots\\v_{2n}\end{array}\right) = v_{21}\vec{e}_1+v_{22}\vec{e}_2+\cdots+v_{2n}\vec{e}_n")
Finally, with all of that math in place,

Doing the same thing to the second part of D,
")
The same thing can be done to all of the vectors in D. But rather than writing n different summations we can write, ")
")
When the 
All but one of the ")
 = \sigma(\vec{p})D\left(\vec{e}_{1},\vec{e}_{2}, \cdots, \vec{e}_{n}\right)")
=(-1)^k")
")
So,

Which is exactly the definition of the determinant! The other uses for the determinant, from finding eigenvectors and eigenvalues, to determining if a set of vectors are linearly independent or not, to handling the coordinates in complicated integrals, all come from defining the determinant as the volume of the parallelepiped created from the columns of the matrix. It’s just not always exactly obvious how.
For example: The determinant of the matrix ")
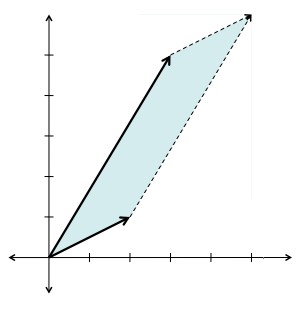
The parallelepiped (in this case a 2-d parallelogram) created by (2,1) and (3,5).
Using the tricks defined in the post:
![\begin{array}{ll} D\left(\left(\begin{array}{c}2\\1\end{array}\right),\left(\begin{array}{c}3\\5\end{array}\right)\right) \\[2mm] = D\left(2\vec{e}_1+\vec{e}_2,3\vec{e}_1+5\vec{e}_2\right) \\[2mm] = D\left(2\vec{e}_1,3\vec{e}_1+5\vec{e}_2\right) + D\left(\vec{e}_2,3\vec{e}_1+5\vec{e}_2\right) \\[2mm] = D\left(2\vec{e}_1,3\vec{e}_1\right) + D\left(2\vec{e}_1,5\vec{e}_2\right) + D\left(\vec{e}_2,3\vec{e}_1\right) + D\left(\vec{e}_2,5\vec{e}_2\right) \\[2mm] = 2\cdot3D\left(\vec{e}_1,\vec{e}_1\right) + 2\cdot5D\left(\vec{e}_1,\vec{e}_2\right) + 3D\left(\vec{e}_2,\vec{e}_1\right) + 5D\left(\vec{e}_2,\vec{e}_2\right) \\[2mm] = 0 + 2\cdot5D\left(\vec{e}_1,\vec{e}_2\right) + 3D\left(\vec{e}_2,\vec{e}_1\right) + 0 \\[2mm] = 2\cdot5D\left(\vec{e}_1,\vec{e}_2\right) - 3D\left(\vec{e}_1,\vec{e}_2\right) \\[2mm] = 2\cdot5 - 3 \\[2mm] =7 \end{array}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Bll%7D++D%5Cleft%28%5Cleft%28%5Cbegin%7Barray%7D%7Bc%7D2%5C%5C1%5Cend%7Barray%7D%5Cright%29%2C%5Cleft%28%5Cbegin%7Barray%7D%7Bc%7D3%5C%5C5%5Cend%7Barray%7D%5Cright%29%5Cright%29+%5C%5C%5B2mm%5D++%3D+D%5Cleft%282%5Cvec%7Be%7D_1%2B%5Cvec%7Be%7D_2%2C3%5Cvec%7Be%7D_1%2B5%5Cvec%7Be%7D_2%5Cright%29+%5C%5C%5B2mm%5D++%3D+D%5Cleft%282%5Cvec%7Be%7D_1%2C3%5Cvec%7Be%7D_1%2B5%5Cvec%7Be%7D_2%5Cright%29+%2B+D%5Cleft%28%5Cvec%7Be%7D_2%2C3%5Cvec%7Be%7D_1%2B5%5Cvec%7Be%7D_2%5Cright%29+%5C%5C%5B2mm%5D++%3D+D%5Cleft%282%5Cvec%7Be%7D_1%2C3%5Cvec%7Be%7D_1%5Cright%29+%2B+D%5Cleft%282%5Cvec%7Be%7D_1%2C5%5Cvec%7Be%7D_2%5Cright%29+%2B+D%5Cleft%28%5Cvec%7Be%7D_2%2C3%5Cvec%7Be%7D_1%5Cright%29+%2B+D%5Cleft%28%5Cvec%7Be%7D_2%2C5%5Cvec%7Be%7D_2%5Cright%29+%5C%5C%5B2mm%5D++%3D+2%5Ccdot3D%5Cleft%28%5Cvec%7Be%7D_1%2C%5Cvec%7Be%7D_1%5Cright%29+%2B+2%5Ccdot5D%5Cleft%28%5Cvec%7Be%7D_1%2C%5Cvec%7Be%7D_2%5Cright%29+%2B+3D%5Cleft%28%5Cvec%7Be%7D_2%2C%5Cvec%7Be%7D_1%5Cright%29+%2B+5D%5Cleft%28%5Cvec%7Be%7D_2%2C%5Cvec%7Be%7D_2%5Cright%29+%5C%5C%5B2mm%5D++%3D+0+%2B+2%5Ccdot5D%5Cleft%28%5Cvec%7Be%7D_1%2C%5Cvec%7Be%7D_2%5Cright%29+%2B+3D%5Cleft%28%5Cvec%7Be%7D_2%2C%5Cvec%7Be%7D_1%5Cright%29+%2B+0+%5C%5C%5B2mm%5D++%3D+2%5Ccdot5D%5Cleft%28%5Cvec%7Be%7D_1%2C%5Cvec%7Be%7D_2%5Cright%29+-+3D%5Cleft%28%5Cvec%7Be%7D_1%2C%5Cvec%7Be%7D_2%5Cright%29+%5C%5C%5B2mm%5D++%3D+2%5Ccdot5+-+3+%5C%5C%5B2mm%5D++%3D7++%5Cend%7Barray%7D&bg=ffffff&fg=000&s=0&c=20201002)
Or, using the usual determinant-finding-technique, 





Pingback: Carnival of Mathematics #99 « Wild About Math!
Pingback: TWSB: We’re In the Matrix | Eigenblogger
Pingback: TWSB: We’re In the Matrix | Eigenblogger